这个笔记完全是自学所记,主要记录一些关键知识和自己的理解。
曲率和 Frenet 标架
曲率的定义
设曲线 r=r(s) (s 为弧长参数) 存在二阶导数,则称 ∣r′′(s)∣ 为曲线在 P(s) 处的曲率,记作 κ(s)。
r′(s) 的长度永远为 1,所以它实际上就是曲线在 r 在 P(s) 处的单位切向量,那么曲率也就体现了曲线的切向的变化率。在几何直观上,它描述了曲线的弯曲程度。
- 曲线为直线当且仅当其曲率永远为 0。
- 圆的曲率恒为一个非零常数。
通过把圆放到一个合适的坐标系里,使得圆的方程为
r(s)=(Rcos(Rs),Rsin(Rs),0)
那么就有
⎩⎨⎧r′(s)r′′(s)=(−sin(Rs),cos(Rs),0)=R1(−cos(Rs),−sin(Rs),0)
于是圆的曲率恒为 R1。
Frenet 标架
设曲线 r(s) 在每一点的曲率都不等于 0,则称
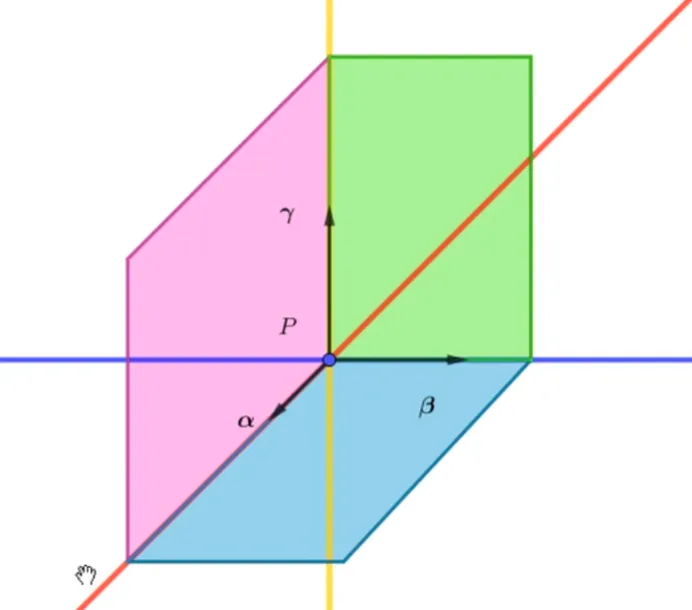
⎩⎨⎧α(s)β(s)γ(s)=r′(s)=∣r′′(s)∣r′′(s)=∣r′(s)×r′′(s)∣r′(s)×r′′(s)
分别为曲线在 P(s) 处的单位切向量、主法向量和副法向量。这三个向量都是单位向量。
当一个向量函数在每一点的值模长始终为 1 时,它的导函数在每一点和它都垂直。所以,我们就得出 β(s) 和 α(s) 垂直。因此,上面的三个向量就两两垂直。
于是,我们称
{P(s);α(s),β(s),γ(s)}
为曲线 r(s) 在点 P(s) 处的 Frenet 标架,三个向量统称为基本向量。
基本向量和曲率的一般参数表示
⎩⎨⎧αγβ=∣r′(t)∣r′(t)=∣r′(t)×r′′(t)∣r′(t)×r′′(t)=γ×α
证明略。主要思路即通过复合函数求导法则推导。注意几何含义:dtds=∣r′(t)∣。
在推导过程中,我们会得到
r′(t)×r′′(t)=∣r′(t)∣3(r′(s)×r′′(s))
于是就有
κ=∣r(t)′∣3∣r′(t)×r′′(t)∣
基本三棱形
- 过 P 点,平行于 α,β,γ 的直线分别称为曲线在点 P 的切线、主法线和副法线。
- 过 P 点,垂直于 α,β,γ 的平面分别称为曲线在点 P 的法平面,从切平面和密切平面。
- 由 P 点和 P 点的三个基本向量,切线,主法线和副法线,法平面,从切平面和密切平面构成的图形称为曲线在 P 点的基本三棱形。
它们的方程分别为:
⎩⎨⎧ρ−rρ−rρ−r(ρ−r)⋅α(ρ−r)⋅β(ρ−r)⋅γ=λα=λβ=λγ=0=0=0
空间曲线一点处的密切平面就是和曲线在该点最为贴近的一个平面。
挠率和 Frenet 公式
挠率
γ′(s)∥β(s):
由
α′(s)=κ(s)β(s)
和
γ′(s)=α′(s)×β(s)+α(s)×β′(s)
可得
γ′(s)=α(s)×β′(s)
所以,γ′(s) 与 α(s) 垂直,而 γ(s) 为单位长,于是可得 γ′(s) 垂直于 γ(s),因此 γ′(s)∥β(s)。
我们不妨设
γ′(s)=−τ(s)β(s)
于是(这里用到了 β(s) 是单位向量的性质)
τ(s)=−γ′(s)⋅β(s)
我们称 τ(s) 为曲线的挠率。
挠率的表达式
τ(s)τ(t)=κ2(s)(r′(s),r′′(s),r′′′(s))=∣r′(t)×r′′(t)∣2(r′(t),r′′(t),r′′′(t))
Frenet 公式
⎩⎨⎧α′(s)β′(s)γ′(s)=κ(s)β(s)=−κ(s)α(s)+τ(s)γ(s)=−τ(s)β(s)
此为曲线在点 P(s) 处的 Frenet 公式。这意味着,三个基本向量的导数可以直接由曲率、挠率和三个基本向量的线性组合表示。
几何含义
曲率处处不为零的空间曲线为平面曲线,当且仅当其挠率为 0。
单向证明:
如果 r(s) 是一条平面曲线,那么设它所在的平面的法向量为 n。于是单位切向量
α⋅n=0
上式两端同时对 s 求导即有
{r′′(s)⋅nr′′′(s)⋅n=0=0
于是就可以知道,这三个导数共面,根据挠率的表达式就得到挠率的值为 0。
这说明,挠率刻画了空间曲线在垂直于切平面方向上的弯曲程度。
所有密切平面过定点的正则曲线是平面曲线。
这和所有切线过定点的正则曲线是直线很类似!
空间曲线一点邻近的结构
对于向量函数,我们依然有泰勒展开式。因此,如果 r(s) 是一条曲率处处不为 0 的空间曲线,那么就有它在 P(0) 的邻近有
r(s)−r(0)=α(0)s+21κ(0)β(0)s2+61κ′(0)β(0)s3+61κ(0)(−κ(0)α(0)+τ(0)γ(0))s3+o(s3)
整理即有
r(s)−r(0)=(s−61κ2(0)s3)α(0)+(21κ(0)s2+61κ′(0)s3)β(0)+(61κ(0)τ(0)s3)γ(0)+o(s3)
这实质上是转化成了坐标系 {r(0),α(0),β(0),γ(0)} 下的坐标。
⎩⎨⎧x(s)y(s)z(s)=s−61κ2(0)s3+o(s3)=21κ(0)s2+61κ′(0)s3+o(s3)=61κ(0)τ(0)s3+o(s3)
如果我们再做一次近似,那就变成了
⎩⎨⎧xˉ(s)yˉ(s)zˉ(s)=s=21κ(0)s2=61κ(0)τ(0)s3
这就得到了一个新的曲线 rˉ(s)={xˉ(s),yˉ(s),zˉ(s)}。我们把这个曲线称作 r(s) 在点 s0=0 邻近的近似曲线。
那么,一种自然的想法,就是通过近似曲线的形状来近似地构建原曲线的形状。
一个比较好的性质是,近似曲线和原曲线在 s0=0 处的曲率和挠率是一致的。
可以看到,近似曲线在密切平面上的投影是一个抛物线。近似曲线穿过法平面,但不穿过从切平面。
近似曲线在法平面上的投影是一个半立方抛物线。近似曲线穿过密切平面,但不穿过从切平面。
综上:
-
近似曲线必然穿过密切平面和法平面,但不穿过从切平面。
-
主法向量总是指向曲线凹入的方向。
近似曲线的形状取决于曲率和挠率,因此,曲率和挠率决定了几何曲线的形状。
曲线论中的几何不变量
参数变换
设 t=t(tˉ) 是曲线 r(t) 的参数 t 关于变量 tˉ 的 C1 类函数,如果
dtˉdt=0
则称 t=t(tˉ) 是曲线 r(t) 的一个参数变换。如果
dtˉdt>0
则称 t=t(tˉ) 是曲线 r(t) 的一个保持定向的参数变换。
由于作为参数变换时,已经保证了 t(tˉ) 的导数不为零,同时又因为它的导函数连续,所以就有
dtˉdt
的符号是确定的,要么为正,要么为负。
对一条曲线应用参数变换时,曲线的形状并不会发生改变,改变的只是曲线的参数范围以及曲线的方向。
进一步地,有:
空间曲线的正则性、弧长的绝对值,曲率和挠率都与参数变换的选择无关。
这些结论通过复合求导法则很好证明,此略。
运动
把空间中的映射
a→Aa+b
称为运动。其中, A 是一个行列式为 1 的正交矩阵,被称为运动的系数矩阵。
显然,考虑向量 p,它的两个顶点做了运动后,可以得到
p′=Ap
更进一步,有如下结论:
- 运动不改变两个向量的点积。
- 运动不改变向量的长度。
- 运动不改变两个向量的夹角。
- 运动不改变两个向量的叉积。
- 运动不改变三个向量的混合积。
然后,就会有很自然的结论;
- 运动将一个空间右手直角标架映射成一个新的空间右手直角标架。
我们还可以证明出,对于任意两个右手直角标架,都存在一个运动,将其中一个变换成另一个。这可以联想到图形学中,世界坐标系->局部坐标系的映射。
利用运动关于坐标系映射的性质,下面的结论也变得自然:
空间曲线的正则性,弧长,曲率和挠率都是运动不变量。
综上,我们得出,空间曲线的正则性,曲率和挠率都是空间不变量。
曲线论的基本定理
设 κ(s)>0 和 τ(s) 是两个连续函数,那么在空间中存在唯一形状的一条曲线,满足它以 s 为弧长, κ(s) 为曲率, τ(s) 为挠率。
时间原因,这里不给出证明。
曲面的基本概念
称二元向量函数 r(u,v)={x(u,v),y(u,v),z(u,v)},(u,v)∈D 为 R3 中的一个参数曲面(曲面)。此处, D 指 u,v 平面上的一个开区域,往往为开矩形 (a,b)×(c,d)。
我们用 ru={xu,yu,zu} 表示 r(u,v) 对 u 的偏导数,用 ruu,ruv,rvv 表示 r(u,v) 的二阶偏导数。一般而言,我们希望曲面至少是 C3 类的,即它至少有三阶的连续偏导数。
曲面的正则性
如果点 (u0,v0) 满足
(ru×rv)∣(u0,v0)=0
则称 (u0,v0) 是曲面上的正则点。如果曲面上的所有点都是正则点,则称这个曲面是一个正则曲面。
这保证了, ru(u0,v0) 与 rv(u0,v0) 是不共线的,且它们都不为 0。
二维实函数的图像就是一个正则曲面。
给定一个正则点 P=(u0,v0),存在一个 P 的邻域 U 到曲面 r(u,v)∣U 的一一映射。
进一步地,对于一个正则曲面,可以实现 (u,v) 平面上的点到 r(u,v) 上的一一映射。
正因此,我们可以称 (u0,v0) 为曲面的位置向量 r(u0,v0) 的终点的曲纹坐标,称 u,v 平面中的直线 v=v0,u=u0 在 r 下的像为曲面的 u− 曲线和 v− 曲线。u− 曲线和 v− 曲线统称为坐标曲线;曲面上的两族坐标曲线构成的图形,称为曲纹坐标网,简称坐标网。
切平面与法线
切向量
前面我们已经说明了对于正则曲面, (u,v) 和 r(u,v) 存在双射。因此,我们很容易想到,将曲面上的曲线,利用 (u,v) 平面上的曲线来表示。
(u,v) 平面上的曲线很容易表示为 (u(t),v(t)),那么对应到曲面上,也就是 r(t)=r(u(t),v(t))。
如果一条连续可微的曲面上的曲线过了点 (u0,v0),那么该曲线在 (u0,v0) 的切向量,称为曲面在该点的一个切向量。
切平面
令我们欣喜的是,对于一个正则曲面,一点 (u0,v0) 上的所有切向量恰好在同一平面上。
考虑任意一条曲线 (u(t),v(t)),设它在 (u0=u(t0),v0=v(t0)) 的切向量为 a,有:
a=dtdr(u(t),v(t))∣t=t0=rudtdu∣t=t0+rvdtdv∣t=t0
这就意味着, a 是在 ru,rv 张成的一个平面上!
于是,我们就可以定义这个平面为曲面在该点的切平面。
切方向
切平面上非零切向量所指的方向,称为切方向。切方向的方向可以通过切向量在基底 ru,rv 下的坐标 (dtdu(t),dtdv(t)) 来表示。
切方向的方向通过比值 dtdu(t):dtdv(t) 写成了 du:dv。考虑二元向量函数的全微分表达式
dr=rudu+rvdv
可以发现 dr 在 ru,rv 下的坐标为 (du,dv)。那么,我们把 dr 称为切向量也就是合理的。
法向量
把切平面的法向量称为空间曲面在该点的法向量。过该点,且平行于法向量的直线,被称为曲面在该点的法线。向量 ru×rv 被规定为正法向量。
曲面的基本形式
曲面的第一基本形式
